










")















HRP-5P while inheriting the technology of the latest height 182 to take advantage of the hardware technology of cm, in the humanoid robot of body weight 101 kg, provided with the HRP series best of physical ability. By incorporating robot intelligence consisting of environmental measurement / object recognition technology, whole-body motion planning / control technology, task description / execution management technology, and high reliability systemization technology, it is possible to create plaster, which is a typical heavy work at the construction site We realized autonomous execution of board construction. By utilizing HRP-5P as a development platform of industry-academia collaboration, it is expected that research and development for practical use of humanoid robots in building construction sites and assembly of large structures such as aircraft and ships will be accelerated.
Part of the technology developed this time will be announced at IEEE / RSJ International Conference on Intelligent Robots and Systems (IROS 2018) to be held in Madrid, Spain from 1st to 5th October. In addition, we will exhibit static exhibition at World Robot Expo 2018 which will be held from 17th to 21st October at Tokyo Big Sight (Koto Ward, Tokyo).
Social background of development
Along with the declining birthrate and the aging of the population, it is expected that many industries such as the construction industry will fall into serious manual shortages in the future, and it is urgent to solve this problem by robot technology. Also, at work sites assembling very large structures such as building sites and assembling of aircraft / ships, workers are carrying out dangerous heavy work work, and it is desired to replace these tasks with robot technology. However, at the assembly site of these large structures, it is difficult to develop a work environment tailored to the robot, and the introduction of robots has not progressed. Humanoid robots have a body structure similar to human beings, so it is possible to substitute for human work without changing the working environment and release from heavy work work becomes possible.
History of research
AIST has developed the HRP series in cooperation with several private enterprises including Kawada Industry Co., Ltd. (now Kawada Robotics Co., Ltd.) and has been working on the development of basic technologies for practical application. HRP-2 realized bipedal walking, lying down / rising motion, walking in the narrow path, etc. In HRP-3, it was possible to work bolts of bridges by walking on a slippery road surface and remote control. In the research of a disaster-responding humanoid robot that AIST has been working on since 2011, HRP-2 reform that improved HRP-2 physical abilities (limb length, range of motion, joint output, etc.) We have achieved semi-autonomous execution of tasks such as irregular terrain walking and valve turning based on measurement. However, heavy work such as construction on the wall of gypsum board lacked physical ability, and the number of joints and the range of motion of joints were not sufficient to simulate human motion in a complicated environment. Therefore, AIST decided to develop a humanoid robot HRP-5P with physical abilities capable of substituting human hard work.
HRP-5P inherits the development technologies of the HRP series and uses the patent rights of Honda Motor Co., Ltd. to utilize it.
A part of this development is “Autonomous humanoid robot (innovative robot element technology field) /” Next generation robot core technology development / (innovative robot element technology field) “commissioned by the National Institute of Advanced Industrial Science and Technology (NEDO) / Development of high reliable humanoid robot system compatible with non-maintenance environment “, Grant-in-Aid for Scientific Research by the Japan Society for the Promotion of Science” Implementation of unknown environment adaptive whole-body movement planning method of humanoid robot based on environmental model acquisition ” : JP 17 H 07391).
Content of research
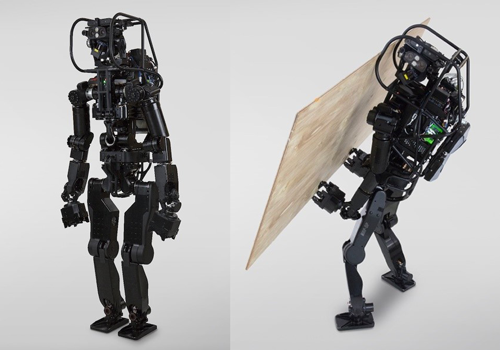
We aimed to replace heavy labor work, developed prototype HRP-5P, a humanoid robot that combines robust body and advanced intelligence and can autonomously work with robot alone.
- Height 182 cm, weight 101 kg, neck 2It has degrees of freedom , 3 degrees of freedom of the waist, 8 degrees of freedom of each arm, 6 degrees of freedom of each leg and 2 degrees of freedom of each hand, with maximum freedom in HRP series excluding hand parts. Compared with HRP – 2 modification, one degree of freedom is added to the waist and one degree of freedom is added to the base of the arm part, so it is possible to operate closer to humans. This allowed handling of large objects such as gypsum board (1820 × 910 × 10 mm, about 11 kg) and control panel (plywood) (1800 × 900 × 12 mm, about 13 kg) with both arms .
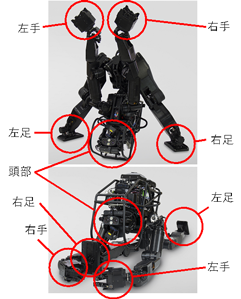
- In order to simulate human motion with a robot with fewer degrees of freedom than a human being, the maximum movable range is ensured even in hip joints and hip joints where multiple joints concentrate. For example, the range of movement of the hip joint that flexes and extends legs is 140 degrees for human beings, HRP – 5P for 202 degrees (Figure 1), the range of motion for the waist joints to turn the body is HRP – 5P is 300 degrees. This made it possible to work in various postures, such as a posture that crouched deeply and twisted his upper body.
- Adoption of a high-powered motor, introduction of cooling to the drive mechanism, and adoption of a joint drive system with multiple motors at some joints improved the joint torque and speed on average by about twice as compared with the HRP-2 modification. This enabled heavy loading work to lift the gypsum board from the state of flat loading (the loading weight of one arm with the arm extended horizontally is 1.3 kg of HRP – 2 modified, 0.9 of HRP – 4 kg, 2.9 kg for HRP-5P).
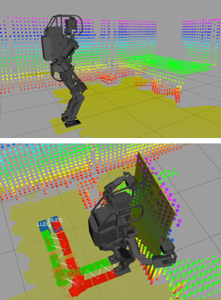
- Three-dimensional measurement of the surrounding environment at all times (0.3 Hz) using a head complex sensor. Even in situations where the field of view is restricted by work objects due to accumulation of measurement results and updating of memories, walking correction with respect to walking plan of conveyance and slippage of feet etc. became possible (Fig. 2).
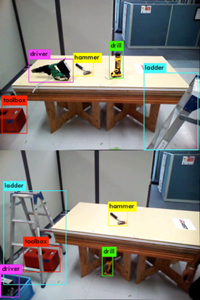
- Using the image database of the newly constructed work objectWe learned convolution neural networks and it was possible to detect ten kinds of object regions of two-dimensional images with high precision of 90% or more even under poor background and illumination conditions (Fig. 3).
- Robot simulatorBuilding a virtual test environment of robot intelligence on Choreonoid , and 24 hours of softwareBy monitoring the regression, it is possible to maintain the quality of large-scale software of about 250,000 rows and construct a highly reliable robot system.
|
|
|
|
Through the integration of the above technologies, it has been realized to autonomously carry out the construction of a gypsum board wall which requires handling and transport of large heavy objects, on a HRP-5P stand alone at a simulated housing construction site.
Specifically, it is the following series of operations.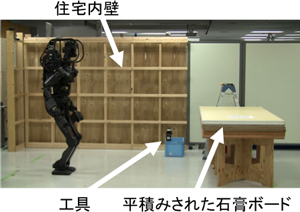
- ① Perform three dimensional map creation and object detection of the surrounding environment and approach the work bench.
- ② Lean on the workbench while shifting the stacked plaster board one sheet and lift it up.
- ③ Transport the gypsum board to the wall while recognizing the surrounding environment.
- ④ Lower the gypsum board and stand against the wall.
- ⑤ Recognize and pick up tools using high precision AR markers .
- ⑥ Grasp the gypsum board to the wall with the screw while securing the stability by gripping the furring edge .
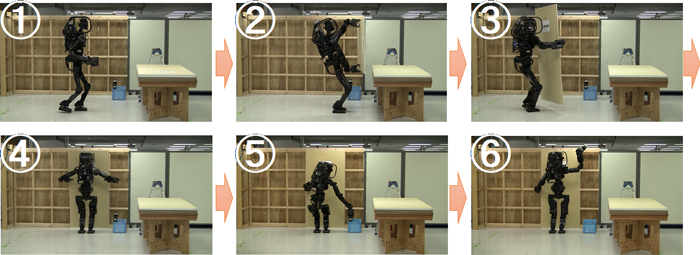 |
| Figure 4 Autonomous gypsum board wall construction by HRP-5P |
Future plans
Promote utilization of HRP-5P by industry-academia collaboration as a research and development platform aiming for practical use of humanoid robots. Robot intelligence research and development on the platform is aimed at autonomous replacement of various work at the site of assembly of large structures such as buildings, houses, aircraft and ships. This will compensate for the shortage of workers, free human beings from heavy labor work, and support to focus on higher value added work.
Explanation of terms
- ◆ HRP series
- HRP-1 HRP-1
Human model developed by Honda Motor Co., Ltd. based on the company’s P3 in HRP project “Ministry of Economy, Trade and Industry” R & D of Human Cooperative and Coexistent Robot System “(HRP Project) conducted over five years from 1998 robot. Height 160 cm, weight 99 kg (excluding batteries). Build the foundation of biped walking technology used in later HRP series. Humanoid robot developed by AIST in collaboration with several private companies in the
HRP-2
HRP project. Light weight, high rigidity, high density electrical design design technology, height 154 cm, weight 58 kg (including battery) realized. Announced in 2002. In addition to bipedal walking, it realized an action to rise from a falling state. After the HRP project is completed, it is commercialized as a research and development platform, and it is used by universities and research institutes both in Japan and overseas.
HRP-3
Humanoid robot jointly developed by Kawada Industry Co., Ltd., AIST, Kawasaki Heavy Industries, Ltd. in “Research and development of basic humanoid robot working in real environment” promotion project of NEDO basic technology. Announced in 2007. Aiming at application to real environments, it has dust and drip proof function. Realized walking on a slippery road surface and bolt fastening by remote control.
HRP-4C
Humanoid robot developed at AIST’s “Development of user-oriented robot open architecture”. Presented in 2009. Aiming at entertainment application, with a proportion close to the average size of Japanese young women and a real head and hand. Human beings walking and singing by synthetic singing voice, realizing dance. It was later used for evaluation of nursing care equipment.
HRP-4
Humanoid robot developed based on HRP-4C through collaboration between AIST and Kawada Industry Co., Ltd. Presented in 2010. By optimizing specifications and sharing and simplifying parts, we realized a low price R & D platform.
HRP-2 Reinforcement
Humanoid robot developed by AIST by remodeling HRP-2 in NEDO “International R & D / Pilot Project in Robot Field / Research and Development of Humanoid Robot HRP-2 Rehabilitation for Disaster Response”. For responding to disasters, strengthening physical abilities, such as extension of legs and arms and addition of sensors, realize semi-autonomous execution such as irregular terrain walking and valve operation based on 3 dimensional environmental measurement. Participated in the 2015 DARPA Robotics Challenge. [Return to reference source] - ◆ Freedom
- The degree of freedom (Degrees of freedom) is the number of variables that can be freely changed, and in the case of a robot, it means the number of directions in which freely moveable, that is, the number of joint axes. [Return to reference source]
- ◆ Convolution Neural Network
- It is a kind of structure of a neural network widely used in image recognition etc. It is composed of many layers called “convolution layer” and “pooling layer”. [Return to reference source]
- ◆ Choreonoid
- Robot simulator developed mainly by Shinichiro Nakaoka, AIST Intelligent Systems Research Institute. It is open source software on www.choreonoid.org and is scheduled to be used as an official simulator in the simulation game of the World Robot Summit infrastructure and disaster response category. [Return to reference source]
- ◆ Regression
- It causes software malfunctions not intended by software changes. [Return to reference source]
- ◆ High precision AR marker
- AIST Robot Innovation Research Center Hideyuki Tanaka Developed by senior researcher, AR marker and two variable moiré patterns enable markers with high accuracy to be estimated even at the time of direct observation. [Return to reference source]
- ◆ ribbon
- To narrow the gypsum board with screws, narrow wood hit with a transversely struck between the pillar and the pillar. [Return to reference source]
![]() This article has its sources from the company AIST contents and website.
This article has its sources from the company AIST contents and website.





")
{kind=link}